DOI:
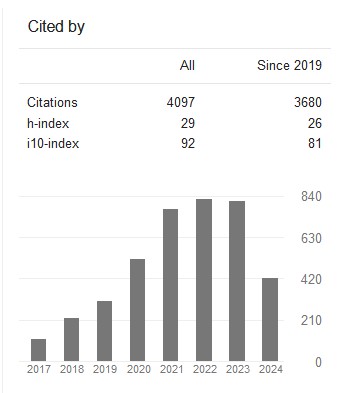
DOI: Google Scholar Analysis
For Authors





ijaems Issue
Fuzzy PID Control Performance Analysis for Robotic Arm System Research( Vol-12,Issue-2,March - April 2026 ) |
|
Author(s): Zhi-Jian Tan, Ho-Sheng Chen |
Download Full Text PDF
Total View : 21
Downloads : 0
Page No: 011-018
|
Keywords: |
|
|
Robotic arm, PID control, fuzzy control |
|
Abstract: |
|
|
Abstract The need for robotic arm control in the realm of industrial automation is growing as technology progresses. In view of the challenges of speed step, external disturbance and joint friction leading to the loss in control accuracy in robotic arm trajectory tracking, the classic PID control system is difficult to meet the requirements of high precision operation. In order to maximize the dynamic responsiveness, this research suggests a fuzzy PID control scheme 1. In the MATLAB Simulink environment, the KUKA KR6R700 six axis robotic arm serves as the simulation object. The results demonstrate that compared with the traditional PID control system, the fuzzy PID control system shortens the joint adjustment time by 43.72% or more reduced by 2.37 s, considerably improves the fit of the robotic arm joint trajectory, and has less trajectory deviation and smoother transition. Its capacity to retain great robustness and trajectory tracking even in challenging work situations is particularly impressive. According to research, the suggested approach can significantly increase robotic arms motion control accuracy in automated production workshops. |
|
| Article Info: | |
|
Received: 25 Jan 2026; Received in revised form: 22 Feb 2026; Accepted:26 Feb 2026; Available online: 03 Mar 2026 |
|
Cite This Article: |
|
|
Citations:
APA | ACM | Chicago | Harvard | IEEE | MLA | Vancouver | Bibtex
| |
Share: |
|