DOI:
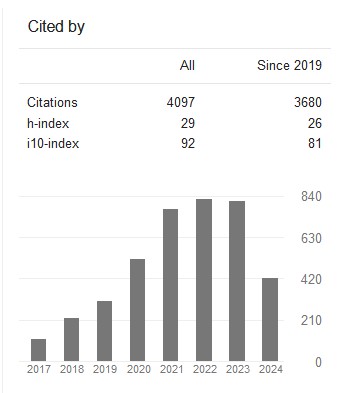
DOI: Google Scholar Analysis
For Authors





ijaems Issue
Study and Analysis of Design Optimization and Synthesis of Robotic ARM( Vol-2,Issue-5,May - May 2016 ) |
|
Author(s): Bhupender, Rahul |
Download Full Text PDF
Total View : 2597
Downloads : 167
Page No: 453-462
|
Keywords: |
|
|
robotic arm, inverse kinematics, dynamics, Jacobian method, motor selection and drive train optimization. |
|
Abstract: |
|
|
A robot is a mechanical or virtual artificial agent, usually an electro-mechanical machine that is guided by a computer program or electronic circuitry. Robots can be autonomous or semi-autonomous. In this thesis, design optimization strategies and synthesis for robotic arm are studied. In the design process, novel optimization methods have been developed to reduce the mass of the whole robotic arm. The optimization of the robotic arm is conducted at three different levels, with the main objective to minimize the robot mass. At the first level, only the drive-train of the robotic arm is optimized. The design process of a robotic arm is decomposed into selection of components for the drive-train to reduce the weight At the second level, kinematic data is combined with the drive-train in the optimization. For this purpose, a dynamic model of the robot is required. Constraints are formulated on the motors, gearboxes and kinematic performance At the third level, a systematic optimization approach is developed, which contains design variables of structural dimensions, geometric dimensions and drive-train composes. Constraints are formulated on the stiffness and deformation. The stiffness and deformation of the arm are calculated through FEA simulation. The main objective of the thesis is to design optimization and synthesis analysis of robotic arm. The corresponding deflections, stresses and strains for that load will be find out by suing the method of finite element analysis. |
|
Cite This Article: |
|
|
Citations:
APA | ACM | Chicago | Harvard | IEEE | MLA | Vancouver | Bibtex
| |
Share: |
|